

Flying Stability for Unmanned VTOLs: Control Techniques and Best Characteristics Selection, PENED 2003

The objective of this research project is the development of a autonomous navigation control system for an unmanned helicopter (Vertical Take-Off and Landing aircraft, VTOL). The primary goal is the autonomous hovering and waypoint navigation of the VTOL. Moreover, the case of navigation while there is failure will be tested. The research involves the development of a control system able to distinguish the failure and safely land the helicopter using appropriate manoeuvres (autorotation etc).
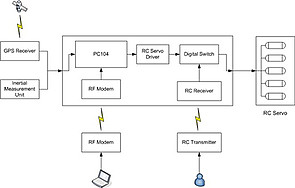
The navigation system will be tested on the VTOL Raptor 60. This helicopter has been added a control platform which involves sensors and computer system. Through remote communication, helicopter will be assigned certain navigation missions which must successfully accomplish.
The project was funded by the Greek Secretariat for Research and Technology and the EADS-3 SIGMA S.A.

